
FMCW Radar Theory
Frequency Modulated Continuous Wave Radar Theory
The FMCW Radar is a simple radar that can measure the distance of a static object and the velocity of a moving object. The basic principle of any Radar is to emit an electromagnetic signal and measure its reflection from a target, Fig. 1(a). The reflection occurs due to the metallic surface of the target that scatters energy in all directions, a small amount of which the Radar receives. The simplest Radar would be to emit a continuous wave and measure the reflected, or scattered, signal. The problem is that the received signal would have the same frequency as the transmitted signal, with only a phase difference. This would result in only being able to estimate the distance as
![]() (Eq. 1),
(Eq. 1),
where d is the estimated distance, n is any integer value, is the wavelength and is the phase difference between the transmitted and received signals. As one can see, the distance is ambiguous, as the distance could be any integer multiple, n, of the wavelength. In addition, such a system would be sensitive to multi-path as well as phase delays in the transmit and receive hardware. The velocity of a moving target, however, could be measured by this simple radar due to the doppler shift, where the frequency difference is directly related to the velocity of the object:
 (Eq. 2),
(Eq. 2),
where fo is the transmit frequency, v is the velocity of the object and c is the speed of light.
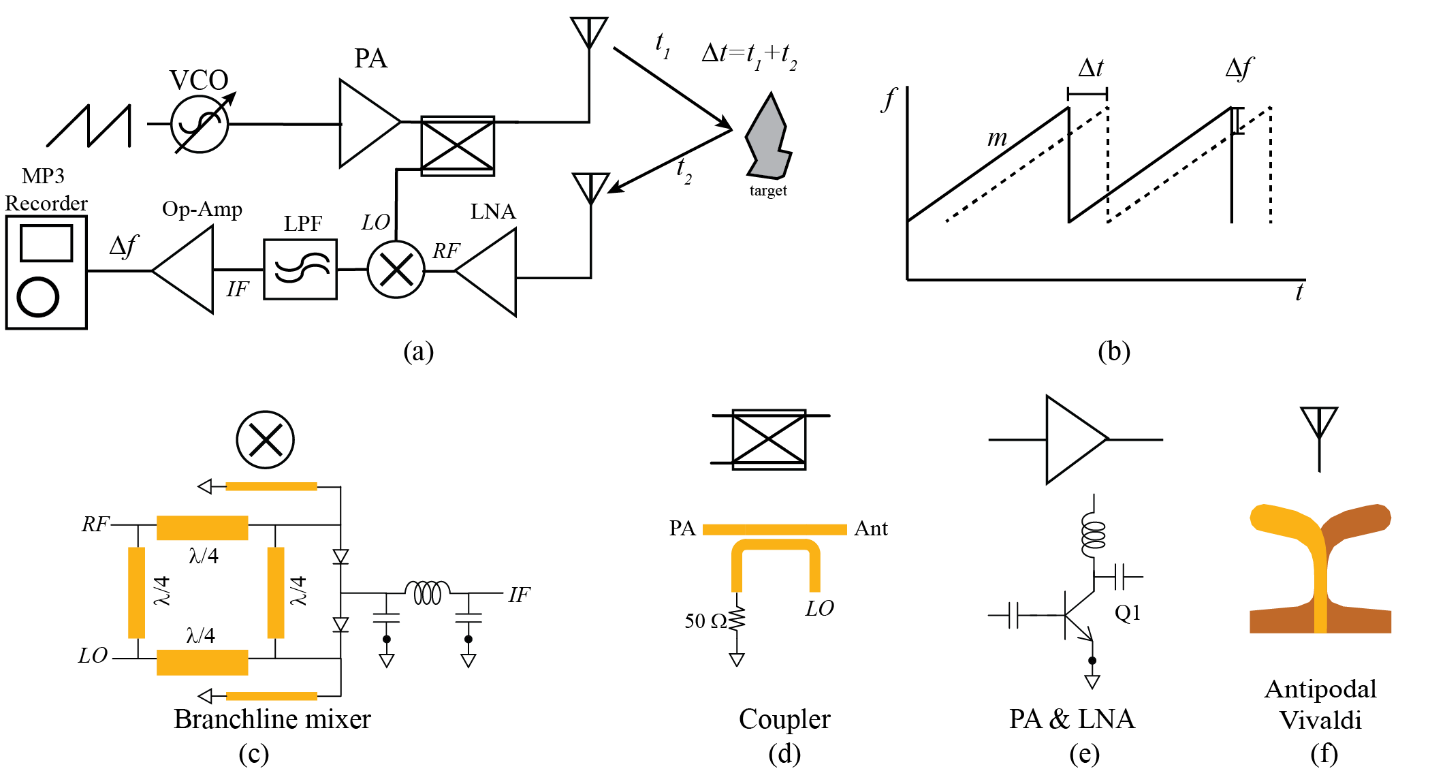 |
| Figure 1: (a) System architecture of the FMCW Radar. (b) Frequency sweep and delay time roundtrip to target creates a t that is measured as a f. (c) Mixer. (d) Coupler. (e) PA and LNA. (f) Antenna. |
A solution to the distance ambiguity problem is to use a frequency swept Radar, such as a FMCW Radar [2]. As shown in Fig. 1(b), the frequency to the transmitter is swept between a start and stop frequency in a linear fashion. The target distance (d) will result in a reflected signal that is delayed by t, where t is the sum of the travel time of the outgoing transmit signal, which is sent from the Radar to the target, and the return time of the transmit signal, which is reflected from the target back to the Radar. Due to this time difference, the received signal will be shifted in time. When the signal returns to the receiver, it will be at a different frequency than the transmit frequency since the VCO has changed frequencies during t . This change in frequency can then be used to determine the absolute distance without ambiguity. The distance is
![]() (Eq. 3)
(Eq. 3)
Where
![]() (Eq. 4)
(Eq. 4)
and m is the slope of the frequency ramp in Hz/s, Fig. 1(b). Measuring a change in frequency can easily be done with a simple homodyne radio [2,3].
Figure 1(a) shows the basic system design of a FMCW Radar. A voltage-controlled oscillator (VCO) is swept between two frequencies by a linear ramp. The voltage-frequency transfer function of the VCO along with the control signal ramp will determine the slope, m. The voltage-frequency transfer function of a VCO is typically non-linear; therefore, a linear control signal will not result in a linear frequency sweep. For first order designs this can be ignored. For higher performance designs, a phase-locked-loop can be used to ensure a linear control signal results in a linear frequency sweep. An example part to accomplish this is the Analog Devices ADF4158.
The VCO output signal is fed to a power amplifier (PA), Fig. 1(e), where the signal is amplified. The PA output signal is then split by a splitter into a power signal and a local oscillator (LO) signal. The splitter in this design is an edge-coupled microstrip coupler with approximately -15 dB coupling, shown in Fig. 1(d), such that the LO is 15 dB below the power signal. The power signal is fed to a wide-bandwidth antenna. For this design, we chose an antipodal Vivaldi antenna, which is easy to build and has a wide bandwidth, Fig. 1(f) [4]. The receiver is a second antenna that feeds a low-noise amplifier (LNA), shown in Fig. 1(e). The output of the LNA is then down converted by a branchline mixer, shown in Fig. 1(c). using the LO signal produced by the splitterThe down converted signal from the branchline mixer is then filtered and amplified to be measured. To allow ease of access for designers and builders, we down convert the received signal to the audio frequency range (20 Hz to 20kHz) so that the ADC in a laptop microphone port can record it. An MP3 recorder, such as in your phone, would work just as well. We can then read in the digitized frequency data from the MP3 file and plot it to see the distance of any target. Velocity can easily be measured through the change in distance over time (for low velocities). Higher velocities will cause significant Doppler shifts and thus an error in the Radar. This is not covered in this short article and workshop.
System Design
In the video below, we design an FMCW radar using Cadence’s AWR Microwave Office.